





ISO26262は自動車業界で機能安全を確保するための国際規格として広く採用されています。この規格は、特に高度運転支援システムや自動運転技術を支えるカメラシステムの設計において欠かせない基準です。
本記事では、ISO26262をわかりやすく解説し、カメラシステムの開発や設計における具体的な適用方法を紹介します。さらに、ISO26262が求める安全基準を満たすための手法や、ASILやHARAといった重要な概念を実例を交えて解説します。
ISO26262について基本から知りたい方や、カメラシステムの安全設計に興味がある方にとって、有益な情報を提供します。
- ISO26262の概要とその基本構造について理解できる
- カメラシステム設計への具体的なISO26262の適用方法を把握できる
- ASILやHARAなどのISO26262の重要な概念と実践的な活用法を学べる
- 検証・妥当性確認やフォールトトレランス設計の手法を理解できる
- ISO 26262 わかりやすく解説:カメラ設計における安全基準の重要性
- ISO 26262 わかりやすく適用する方法:カメラシステムの開発プロセスとは?
ISO 26262 わかりやすく解説:カメラ設計における安全基準の重要性
自動車業界では、安全性と信頼性を高めるための規格が欠かせません。その中でも、ISO 26262は自動車の機能安全を保証するための国際規格として注目されています。
この規格は、車両の電子システムやソフトウェアが安全に動作し、運転支援機能や自動運転技術のリスクを最小限に抑える枠組みを提供します。特に、自動運転車や高度運転支援システム(ADAS)において重要な役割を果たすカメラシステムは、ISO 26262の基準に準拠することで、安全性を確保できます。
本記事では、ISO 26262の基本構造やその重要性、そしてカメラ設計における具体的な適用方法をわかりやすく解説します。
さらに、ASIL(Automotive Safety Integrity Level)やHARA(ハザード分析とリスク評価)といった規格の主要要素を具体例とともに詳しく紹介し、安全性を高めるための実践的なアプローチを学びましょう。
ISO 26262とは?自動車の機能安全を確保するための国際規格をわかりやすく解説

自動車の安全技術は日々進化しており、その一例が高度運転支援システム(ADAS)や自動運転技術の導入です。これに伴い、車両のシステム設計は複雑さを増し、各構成要素が安全に動作することを保証する必要があります。
特に、カメラシステムはこれらの技術の中核を成す重要なコンポーネントです。車線認識、障害物検知、交通標識の読み取りといったタスクを正確に実行するためには、カメラシステムの信頼性と安全性が欠かせません。
こうした背景から、自動車の機能安全を規定する国際規格であるISO 26262が注目を集めています。本記事では、ISO 26262の概要、その重要性、そしてカメラ設計への適用方法について詳しく解説します。
ISO 26262とは何か?
ISO 26262は、自動車業界向けに設計された機能安全規格です。この規格は、車両の電子システムやソフトウェアが安全に動作し、リスクを最小限に抑えることを目的としています。2011年に初版が制定され、2018年に改訂版がリリースされ、最新の技術進歩や業界の要求に対応しています。
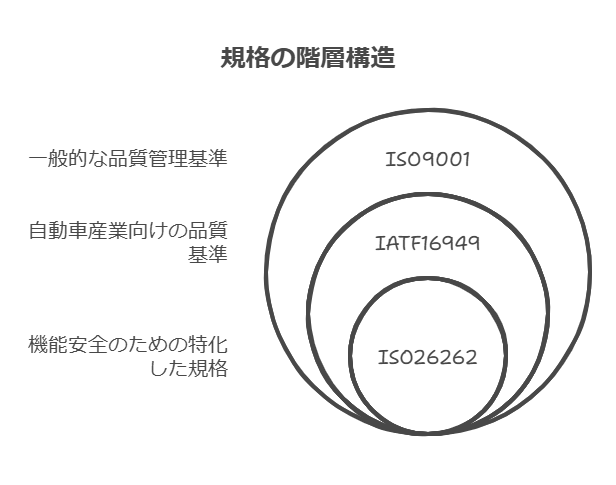
ISO26262は、地蔵者の機能安全に関してであり、その土台として、IATF16949があり、さらにISO9001が土台としてある構成になります。よって、ISO9001とIATF16949と関連している部分もありますが、今回は概略にとどめます。
- ISO9001: 一般的な品質管理システムの基準であり、組織が顧客の要求を満たすためのプロセスを確立し、維持することを目的としています。
- IATF16949: ISO9001の要件を基に、自動車産業特有の要求を追加した規格です。自動車部品の製造における品質管理を強化するために設計されています。
- ISO26262: 自動車の機能安全に関する国際規格であり、特に電子システムの安全性を確保するためのガイドラインを提供します。IATF16949の品質管理の枠組みの中で、機能安全の観点からの要求を満たすことが求められます。
これらの規格は、相互に関連し合いながら、自動車産業における品質と安全性を向上させるための基盤を提供しています。
※ISO26262の規格書はこちら(日本規格協会)から入手してください(有料)
<カメラ設計における適用例>
例えば、自動車用のフロントカメラを設計する場合、以下の点がISO 26262の枠組みに該当します。
- 物体検知の信頼性: カメラが障害物や歩行者を確実に認識できるよう、リスクベースアプローチで設計。
- 故障時の安全対策: カメラが誤動作した場合に、システム全体に影響を及ぼさないようフェイルセーフメカニズムを実装。
- ASIL分類の適用: カメラシステムの安全性要件を、ASIL D(最も厳しい基準)に従って評価する。
ISO 26262の主な特徴
ISO 26262の適用範囲は広く、車両の開発から廃棄までのライフサイクル全体をカバーします。具体的には、システム設計、リスク評価、検証、保守の各プロセスで安全性を保証するための基準を提供します。
カメラ設計における具体的な特徴
ライフサイクル全体を対象:カメラシステムは設計段階だけでなく、製造、運用、メンテナンス、そして廃棄に至るまで安全性を維持する必要があります。運用段階ではカメラのセンサー故障をリアルタイムで検知し、ユーザーに警告を出す仕組みが求められます。
リスクベースアプローチ:ISO 26262では、リスクの重大性に応じて安全対策を講じることを推奨しています。カメラが障害物検知に失敗するリスクを評価し、必要な安全機構(冗長設計やソフトウェア診断機能)を追加します。
ASILによる安全度分類:ISO 26262では、ASIL(Automotive Safety Integrity Level)に基づいてシステムの安全要件を分類します。例えば、歩行者検知機能を備えたカメラにはASIL Dが適用される場合が多く、最も厳格な設計基準が求められます。
ISO 26262の重要性
カメラ設計における安全性の向上:ISO 26262をカメラ設計に適用することで、リスクを事前に特定し、設計段階で適切な対策を講じることが可能です。例えば、車線認識機能を持つカメラが曖昧な道路標識を誤認識しないよう、センサー入力のフィルタリングや画像処理アルゴリズムの精度向上が必要です。
信頼性の確保:規格に準拠することで、自動車メーカー間で統一された基準を満たすことができます。これにより、部品供給業者とメーカーの間で円滑な連携が可能となり、結果としてシステム全体の信頼性が高まります。
法規制への対応:自動運転技術が普及する中、一部の地域ではISO 26262への準拠が法的要件となる場合があります。特に、欧州連合(EU)や中国では、規格に基づいた認証が求められることがあります。
ISO 26262の構造とカメラ設計への応用
ISO 26262は、全11章で構成され、それぞれ異なるプロセスを規定しています。カメラ設計においては、以下のように適用されます。
第1章 適用範囲、用語、定義:ISO 26262の適用範囲や重要な用語を定義する章です。この基盤により、規格の一貫した適用が保証されます。
カメラ設計への応用:用語「故障」や「リスク」の定義を理解し、カメラ設計プロジェクトで一貫して使用します。カメラシステムが対象となる要件を明確化します(例:先進運転支援システム内のフロントカメラ)。
第2章 機能安全管理:プロジェクト全体を通じて、機能安全を管理するための方針と計画を策定します。
カメラ設計への応用:機能安全計画を策定し、カメラセンサーの設計や製造工程に適用します。安全性を確保するために必要なリソースや責任を明確にします。
第3章 コンセプトフェーズ:ハザード分析とリスク評価(HARA)を通じて、システムの安全目標を定義します。
カメラ設計への応用:雨天や夜間での視界不良がカメラ機能に与えるリスクを特定し、これを軽減するためのアルゴリズムを設計します。衝突回避や車線維持のために必要な安全目標を定義します。
第4章 システムレベルの製品開発:技術的な安全要件を具体化し、システム設計に反映します。
カメラ設計への応用:カメラとLiDAR、レーダーなどの他のセンサー間の通信を設計し、タイミングの一貫性を確保します。カメラがシステム全体の要件に従って動作することを確認する統合テストを実施します。
第5章 ハードウェアレベルの製品開発:安全性を確保するために、ハードウェアコンポーネントの設計、検証を行います。
カメラ設計への応用:カメラセンサーの冗長性を設計し、単一故障がシステム全体に影響を与えないようにします。センサーの温度変化や振動耐性を評価する環境試験を実施します。
第6章 ソフトウェアレベルの製品開発:安全クリティカルなソフトウェアを設計、実装し、検証します。
カメラ設計への応用:歩行者検知や物体認識アルゴリズムを実装し、誤検知率を最小限に抑える仕組みを設計します。ソフトウェアテストを通じて、エラー検出とフェイルセーフメカニズムが正常に機能することを確認します。
第7章 生産、運用、サービス、廃棄:製品の製造、運用、メンテナンス、廃棄までのプロセスで安全性を維持します。
カメラ設計への応用:カメラシステムの定期的なメンテナンス計画を策定します(例:レンズクリーニング、ソフトウェアアップデート)。廃棄段階でカメラセンサーの環境影響を最小化するためのリサイクル方法を検討します。
第8章 支援プロセス:構成管理、変更管理、検証計画など、開発全般を支援するプロセスを規定します。
カメラ設計への応用:カメラ設計のバージョン管理を徹底し、設計変更時に安全性が損なわれないようにします。設計変更の影響を検証するテスト手順を確立します。
第9章 ASIL指向および安全指向分析:ASIL(Automotive Safety Integrity Level)の評価と適用方法を規定します。
カメラ設計への応用:歩行者認識や車線逸脱防止など、機能ごとにASILを評価し、必要な安全措置を講じます。ASIL Dが適用されるカメラ機能については、特に厳格な診断と冗長性を実装します。
第10章 ガイドラインと例:ISO 26262の適用に関する具体的なガイドラインと事例を提供します。
カメラ設計への応用:故障モード影響解析(FMEA)やフォールトツリー解析(FTA)を活用し、カメラの潜在的なリスクを評価します。ガイドラインを基に、他のセンサーとの安全な統合方法を設計します。
●第11章 ソフトウェアツールと外部システム:開発プロセスで使用するソフトウェアツールの妥当性確認や、ISO 26262の適用外システムとの統合方法を規定します。
カメラ設計への応用:インフォテインメントシステムとの連携設計を行い、安全性を確保します。カメラアルゴリズムの開発に使用するツール(例:シミュレーションソフト)の信頼性を確認します。
ISO 26262は、自動車の安全性を確保するための重要な規格であり、特にカメラ設計においては欠かせないフレームワークです。この規格を適用することで、システムの信頼性を高めると同時に、消費者の安全を守ることができます。カメラ技術が進化する中で、この規格に準拠した設計と開発が、未来の自動運転技術を支える基盤となるでしょう。
ISO 26262をカメラ設計に適用する重要性とは?

ISO 26262をカメラ設計に適用することは、車両の安全性を確保する上で非常に重要です。特に、カメラシステムは運転支援機能や自動運転技術の中核を成すため、その安全性の確保が不可欠です。ISO 26262は、機能安全に関する国際的な標準であり、潜在的なハザードやシステム故障のリスクを最小限に抑える枠組みを提供します。
これを適用することで、カメラシステムの設計段階からリスクを特定し、適切な対策を講じることが可能になります。
例えば、センサーの誤動作やデータ処理エラーが重大な事故につながる可能性があるため、それらを事前に想定し、安全対策を講じる必要があります。一方で、適用には設計コストや開発時間が増加する可能性もあるため、プロジェクト全体のスケジュール管理も重要です。
適用例 センサーの誤動作を想定した場合の設計
カメラセンサーが誤動作した場合やセンサー入力が途絶えた場合に備えた設計を行います。
- センサー異常検知: カメラセンサーからの入力データをリアルタイムで監視し、異常が検知された場合にアラートを発信するシステムを構築します。
- 例: カメラがレンズの汚れや曇りによる視認不良を検知し、運転者に通知。
- フェイルセーフメカニズム: センサー異常時には、カメラデータを補完するために他のセンサー(LiDARやレーダー)からのデータに切り替える設計を実装します。
カメラシステムの設計にISO 26262を導入することで、規格に準拠した製品を開発できるだけでなく、信頼性の高いシステムを構築する基盤を整えることができます。
カメラシステムにおけるハザード分析とリスク評価(HARA)の詳細
ハザード分析とリスク評価(HARA: Hazard Analysis and Risk Assessment)は、ISO 26262のコンセプトフェーズにおける重要なプロセスです。このプロセスの目的は、システムや構成要素が引き起こす可能性のある危険(ハザード)を特定し、そのリスクを評価し、適切な安全対策を講じることです。
HARAでは以下の3つの基準に基づいて、リスクを定量的に評価します。
- Severity(重大度)
危険が発生した場合の影響の深刻さ。例えば、歩行者検知機能の故障が重大事故につながる可能性がある場合、このリスクは「高」と評価されます。 - Exposure(露出頻度)
危険な状況が発生する頻度。例えば、トンネル内での明暗変化など、特定条件下でカメラが誤動作する頻度を考慮します。 - Controllability(制御可能性)
危険な状況を運転者やシステムが回避できる可能性。例えば、カメラの誤動作を運転者がすぐに検知して対処可能であれば「高」と評価されます。
HARAが重要な理由
- リスクの予防
HARAを通じて、システム設計の初期段階でリスクを明らかにできます。これにより、後工程での問題発生を未然に防ぎ、開発コストの増大を回避します。 - 安全基準の遵守
ISO 26262準拠を目指すためには、すべてのリスクが適切に評価され、対策が講じられていることを証明する必要があります。HARAは、このプロセスの基盤となります。 - ユーザーの信頼性向上
カメラシステムの安全性を確保することで、製品の信頼性が向上し、市場での競争力を強化できます。これにより、自動車メーカーや消費者からの評価が高まります。
カメラ設計におけるHARAの適用例
1. 車線認識機能のリスク評価
- ハザードの特定: カメラが薄い車線や消えかかった車線を正確に認識できない場合、車両が車線外へ逸脱するリスクがあります。
- リスク評価:
- Severity: 車両が車線外に逸脱し、対向車との衝突を引き起こす可能性があるため「高」。
- Exposure: 車線が薄い道路で頻繁に発生するため「中」。
- Controllability: 運転者が車線逸脱を認識して修正可能な場合でも、反応が遅れるリスクがあるため「低」。
- 対策:
- ダイナミックレンジ補正アルゴリズムを導入し、薄い車線を検出可能にする。
- 他センサー(LiDARやレーダー)と連携してデータを補完。
2. 歩行者検知機能のリスク評価
- ハザードの特定: カメラが夜間や悪天候時に歩行者を検知できない場合、事故のリスクが増大します。
- リスク評価:
- Severity: 歩行者との衝突は生命に関わる重大事故となるため「非常に高い」。
- Exposure: 夜間や悪天候の頻度に依存するため「中」。
- Controllability: 運転者が完全に対応できない可能性があるため「非常に低い」。
- 対策:
- 赤外線カメラを追加し、暗所での検知能力を向上させる。
- 歩行者認識アルゴリズムに機械学習を導入し、あらゆる条件での精度を向上。
3. 信号認識機能のリスク評価
- ハザードの特定: カメラが信号機を誤認識し、停止するべき場所で車両が進行してしまうリスクがあります。
- リスク評価:
- Severity: 他車との衝突リスクがあるため「高」。
- Exposure: 信号機が存在する交差点で頻繁に発生するため「高」。
- Controllability: 運転者が即座に対応することは難しいため「低」。
- 対策:
- 信号機認識に色認識アルゴリズムだけでなく形状認識も併用する。
- 認識データをリアルタイムで検証し、異常があればシステムに警告を表示。
4. 照明条件の変化によるリスク評価
- ハザードの特定: トンネル内での急激な明暗変化により、カメラが視界を一時的に失うリスクがあります。
- リスク評価:
- Severity: 短期間の視界喪失でも重大な事故を引き起こす可能性があるため「高」。
- Exposure: トンネルがある道路で頻繁に発生するため「中」。
- Controllability: 運転者が完全に対応するのは困難であるため「低」。
- 対策:
- ダイナミックレンジ調整機能をカメラに実装し、急激な明暗変化にも適応できるようにする。
- トンネル進入時に自動で照明条件を調整する制御システムを導入。
HARAは、カメラシステムの潜在的な危険を特定し、リスクを管理するための不可欠なプロセスです。このプロセスを通じて、車両の安全性を大幅に向上させることが可能です。適切なリスク評価を行い、効果的な対策を講じることで、カメラシステムは自動車全体の安全性に寄与し、信頼性の高い製品を市場に提供できます。
ASIL(Automotive Safety Integrity Level)をカメラ設計にどう適用するか?
ISO 26262では、ASIL(Automotive Safety Integrity Level:エーシル)という安全性の指標が導入されており、カメラ設計においてもこの適用が不可欠です。ASILは、システムの潜在的なリスクを評価し、そのリスクに応じて必要な安全要件を定義するフレームワークを提供します。
ASIL(Automotive Safety Integrity Level)の概要
ISO 26262では、システムの潜在的なリスクに基づき、安全性の重要度を5つのレベル(QM、ASIL A、ASIL B、ASIL C、ASIL D)で分類します。これにより、リスクに応じた適切な安全要件を設計プロセスに反映することが可能です。
ASILの分類と違いを以下の比較表で、各ASILレベルの特徴と適用条件を説明します。
| ASILランク | 概要 | 影響の重大度(Severity) | 露出頻度(Exposure) | 制御可能性(Controllability) | 例 |
|---|---|---|---|---|---|
| QM | 品質管理レベル(ISO 26262の範囲外)。安全要求はないが、品質管理が適用される。 | 低 | 低~中 | 高 | エンターテイメント用カメラ(車両の安全に直接関係しない)。 |
| ASIL A | 最低の安全度要求。小さなリスクに対応するための基本的な安全対策を講じる。 | 低 | 中~高 | 高 | 駐車支援カメラ(低速での利用に限られるため重大度が低い)。 |
| ASIL B | 中程度の安全要求。リスクの中程度の制御を目的とする。 | 中 | 中~高 | 中 | 車線逸脱警告システムのカメラ(比較的制御可能なシナリオ)。 |
| ASIL C | 高い安全要求。リスクの高い状況に対応するため、厳格な安全設計が必要。 | 中~高 | 高 | 中 | 歩行者検知カメラ(衝突回避に必要不可欠)。 |
| ASIL D | 最高レベルの安全要求。極めて高いリスクを伴う状況に対応するため、最も厳格な設計要件を適用。 | 高 | 高 | 低 | 自動運転車の主要カメラ(車両制御の中核を担う)。 |
カメラ設計へのASIL適用例
1. QM: エンターテイメントカメラ
- 適用シナリオ: 後部座席用の車載エンターテイメントシステムに使われるカメラ。
- 理由: これらのカメラは車両の運転に直接関与しないため、ASILの適用は必要なく、品質管理(QM)だけが求められます。
2. ASIL A: 駐車支援カメラ
- 適用シナリオ: 低速での駐車を補助するためのカメラ。
- 安全対策: カメラのセンサー異常を検出し、警告を表示する基本的な診断機能を搭載。
3. ASIL B: 車線逸脱警告システム
- 適用シナリオ: 高速道路での車線維持に使われるカメラ。
- 安全対策: 車線を正確に検出するためのアルゴリズムを備え、誤検出時には運転者に警告を送る機能を設計。
4. ASIL C: 歩行者検知カメラ
- 適用シナリオ: 都市部での衝突回避システムに使われるカメラ。
- 安全対策: 夜間や悪天候での歩行者検知精度を向上させるため、赤外線センサーを追加。誤動作を防ぐためのアルゴリズム冗長性を実装。
5. ASIL D: 自動運転用メインカメラ
- 適用シナリオ: 完全自動運転車の環境認識に使われるカメラ。
- 安全対策:
- デュアルカメラ構成による冗長性設計を導入し、センサーの単一故障が発生しても機能を維持可能。
- ソフトウェア診断機能でリアルタイムの異常検知を実施し、安全性を確保。
- ハードウェアの耐久性を強化するため、厳しい環境試験を実施。
ASILの選定がカメラ設計に与える影響
ISO 26262に基づくASILの適用は、カメラ設計のプロセス全体に影響を与えます。
- リスク評価の精度向上: 各シナリオに応じて適切なASILを割り当てることで、リスク評価が正確に行えます。
- 設計コストの最適化: 不必要に高い安全基準を適用することを避け、コスト効率の良い設計が可能です。
- 信頼性の向上: 安全基準を満たしたカメラは、運転者やシステム全体の信頼性向上に寄与します。
ASILは、カメラシステムの設計プロセスで潜在的なリスクに応じた安全要件を定義するための重要な指標です。適切にASILを適用することで、システムの安全性と効率性を両立し、自動車業界での競争力を向上させることができます。
カメラの使用目的やリスクレベルに応じてASILを正しく選定することで、より安全で信頼性の高い製品開発を実現しましょう。
カメラセンサーの冗長性設計とその役割
冗長性設計は、カメラセンサーの信頼性を向上させるために重要なアプローチです。以下に詳細と具体例を説明します。
冗長性設計とは?
冗長性設計は、システムの安全性と信頼性を高めるために不可欠な手法です。この設計手法では、システム内に同じ役割を果たす複数の要素を持たせることで、特定の要素に障害が発生しても全体としての機能を維持できるようにします。
特に、故障が重大なリスクを引き起こす可能性がある安全クリティカルなシステムにおいて、冗長性は重要な役割を果たします。
例えば、航空機や医療機器では、冗長性を持たせることで一部のシステムに障害が発生しても他の要素が即座に補完し、安全性を維持しています。
ISO 26262では、自動車の安全設計にもこの冗長性設計を取り入れることが推奨されており、特に運転支援機能や自動運転システムでは重要視されています。
冗長性設計の具体例:自動運転車の歩行者検知システム
自動運転車の歩行者検知システムは、冗長性設計の典型例です。このシステムでは、歩行者を検知するためにカメラセンサーを主力として使用しますが、カメラ単独では天候や光条件による制限があります。この課題に対応するため、以下のような冗長性設計を採用します。
1. マルチセンサー統合
- カメラセンサー: 主に画像処理を通じて歩行者を認識します。昼間や明るい環境では高い精度を発揮しますが、夜間や濃霧では性能が低下します。
- LiDAR(光検出と測距): 赤外線レーザーを使用して周囲の3Dマッピングを行い、カメラが捉えられない障害物や歩行者を補完します。霧や暗所でも高い精度を発揮します。
- レーダー: 電波を使用して距離と速度を測定し、動いている歩行者を検知します。悪天候下でも安定した性能を提供します。
これらのセンサーを統合することで、単一センサーの欠点を相互に補完し、歩行者検知の信頼性を向上させます。
2. データの相互検証
冗長性設計では、各センサーから取得したデータを比較して、信頼性を向上させる仕組みを採用します。具体的には:
- カメラとLiDARの照合: カメラが検出した歩行者の位置をLiDARデータと比較し、両者の一致を確認することで検知精度を向上。
- レーダーによる動作補足: 歩行者が移動中の場合、レーダーの速度データをカメラとLiDARに統合し、より正確な追尾を実現。
例えば、濃霧の中でカメラが視界を失った場合でも、LiDARとレーダーが補完的に機能するため、システム全体として歩行者を検知し続けることが可能です。
3. フェイルセーフ設計
万が一、カメラセンサー自体に障害が発生した場合でも、システム全体が安全に機能するような設計が施されています。
- 緊急モードへの移行: カメラが故障した際、LiDARとレーダーが主要センサーとして機能し、最低限の安全性能を維持。
- 通知と記録: センサー障害が発生した場合、運転者や中央制御システムに通知し、障害発生状況を記録して後日分析可能にします。
冗長性設計のメリットと注意点
メリット:
- 安全性の向上: 単一センサーに依存しないため、異常発生時でもシステム全体の安全性が保たれる。
- 信頼性の強化: 各センサーが相互補完的に機能することで、環境や状況に依存せず一貫した性能を発揮。
注意点:
- 開発コストの増加: 複数センサーの導入により、設計および製造コストが増加します。
- データ統合の複雑性: 複数のセンサーからのデータを統合し、リアルタイムで処理するには高度なアルゴリズムが必要です。
カメラセンサーの冗長性設計は、自動車の安全性を大幅に向上させる重要なアプローチです。特に、歩行者検知システムのようなクリティカルな機能では、複数センサーの統合やデータ照合を通じて、安全性と信頼性を確保します。
一方で、設計の複雑化やコスト増加といった課題もあるため、プロジェクト全体での適切なバランスが求められます。このような設計手法を取り入れることで、より安全な自動車システムを実現できるでしょう。
ISO 26262におけるカメラシステムの安全メカニズムの構築方法
ISO 26262では、カメラシステムの安全性を確保するための具体的なメカニズム構築方法が定義されています。この規格に基づくと、システムの故障や異常が発生した際に、リスクを最小限に抑える安全メカニズムの設計が必要です。
安全メカニズムには、ハードウェアとソフトウェアの両方が含まれます。例えば、カメラセンサーが正常に動作しているかをリアルタイムで監視する診断機能や、異常を検知した際にシステムをフェイルセーフモードに切り替える仕組みが挙げられます。
さらに、異常検知アルゴリズムを活用して、センサーやデータ処理の異常を迅速に特定し、危険な動作を回避することが推奨されます。これにより、ISO 26262に準拠した安全なカメラシステムの設計が可能になります。
ハードウェアとソフトウェアの協調設計によるカメラの安全性向上
カメラシステムの安全性を向上させるためには、ハードウェアとソフトウェアが密接に連携し、システム全体の信頼性と安全性を高める必要があります。
ハードウェアが担う物理的なデータ収集や基本的な処理に加え、ソフトウェアがそのデータを解析し、意思決定を行う役割を果たします。この協調設計により、異常検知やリスクの軽減が迅速かつ正確に行えるようになります。
適用例:歩行者検知システムの協調設計
歩行者検知システムは、ハードウェアとソフトウェアの協調設計が必要不可欠な例の一つです。このシステムは、車両の前方にいる歩行者を迅速かつ正確に検知し、安全な運転をサポートします。
1. ハードウェアの役割
- カメラセンサー: 歩行者の姿や動きを撮影し、画像データを取得。
- 専用ハードウェア(ASICまたはFPGA): 画像データを高速で処理し、歩行者の輪郭や位置を特定するための基本的な処理を実行。
例えば、夜間でも動作可能な赤外線対応カメラセンサーを使用することで、光条件の悪い環境でも歩行者を検知することができます。また、FPGA(フィールドプログラマブルゲートアレイ)は、リアルタイムでのデータ処理に適しており、歩行者の動きを迅速に分析できます。
2. ソフトウェアの役割
- 異常検知アルゴリズム: ハードウェアから取得したデータを解析し、歩行者の動きや位置の異常を判断。
- 機械学習モデル: 歩行者の形状や動作パターンを学習し、誤検知を最小限に抑える。
- 緊急ブレーキ制御: 歩行者の動きを基に危険を検知した場合、車両制御システムと連携してブレーキを作動させる。
例えば、ソフトウェアはハードウェアが検知した輪郭データを用いて、歩行者が車両に向かって急に動き出した場合に即座に警告を発する仕組みを構築します。これにより、ドライバーが反応する前に自動的に対応することが可能です。
3. ハードウェアとソフトウェアの連携
協調設計により、以下のようなシナジーが生まれます:
- リアルタイム性の向上: ハードウェアが処理したデータを即座にソフトウェアが解析し、危険を検知。
- 異常対応の精度向上: ハードウェアの信号とソフトウェアのアルゴリズムが相互補完的に機能することで、誤検知や未検知を最小限に抑える。
- フェイルセーフ機能: ハードウェアの故障時には、ソフトウェアが代替手段を用いて安全性を維持。
協調設計の課題と克服
ハードウェアとソフトウェアの協調設計にはいくつかの課題があります:
- 設計プロセスの複雑化: ハードウェアとソフトウェアの統合には、多岐にわたる専門知識と慎重な調整が必要です。
- 開発期間の長期化: 両者の設計を同時に進めるため、開発期間が延びる可能性があります。
- コストの増加: 高性能なハードウェアや高度なアルゴリズム開発には、追加コストが伴います。
これらの課題を克服するには、以下のようなアプローチが有効です:
- モデルベース開発(MBD): シミュレーションを活用して、ハードウェアとソフトウェアの連携を早期に検証。
- 継続的統合とテスト: 開発プロセスの各段階で統合テストを実施し、連携の問題を早期に発見。
- 共通プラットフォームの利用: ハードウェアとソフトウェアが同じ開発環境で設計されることで、統合の効率が向上。
ハードウェアとソフトウェアの協調設計は、カメラシステムの安全性を向上させるための重要なアプローチです。
歩行者検知システムの例では、カメラセンサーが取得したデータを専用ハードウェアで高速処理し、ソフトウェアが高度なアルゴリズムで解析することで、正確かつ迅速な安全対応を可能にします。
協調設計には課題もありますが、それを乗り越えることで、より信頼性の高いカメラシステムを構築することができます。
カメラシステムにおけるソフトウェア安全要件の設定方法
ソフトウェア安全要件の設定は、カメラシステムの設計において非常に重要です。これには、ISO 26262で求められる基準に従い、機能安全を確保するための具体的な要件を定義することが含まれます。以下に、具体的な手順を詳しく説明します。
1. システム全体の要件を理解する
ソフトウェア安全要件を設定する前に、カメラシステム全体の役割や使用シナリオを明確にします。
- 手順:
- カメラシステムの設計ドキュメントを確認。
- 使用するシナリオ(夜間運転、雨天、トンネル内など)を特定。
- 車両全体の機能安全目標を把握(例:衝突回避、車線維持)。
- 具体例: 自動運転車に搭載されるカメラが、歩行者を正確に検知し、必要に応じて緊急ブレーキを作動させる役割を担う場合、この目標がソフトウェア安全要件に反映されます。
2. ハザード分析とリスク評価(HARA)を実施
システムが直面する潜在的なリスクを評価し、安全要件を決定する基礎とします。
- 手順:
- HARAを実施し、カメラシステムに関連する潜在的な危険を特定。
- 各危険について、Severity(重大度)、Exposure(発生頻度)、Controllability(制御可能性)を評価。
- ASIL(Automotive Safety Integrity Level)を割り当て。
- 具体例: カメラが濃霧の中で車線を認識できなくなる可能性がある場合、適切なASLI(例:ASIL B)を割り当て、フェイルセーフモードを設定する必要があります。
3. ソフトウェア安全要件を定義
リスク評価に基づいて、具体的なソフトウェアの安全要件を設定します。
- 手順:
- 各リスクに対応する要件を文書化(例:カメラデータの処理速度要件)。
- ISO 26262に準拠した形式で記述(例:「システムは100ms以内に異常を検知する」)。
- フェイルセーフモードや冗長性の確保を考慮。
- 具体例:
- カメラセンサーが取得したデータを50ms以内に処理し、異常なデータが検出された場合は緊急警告を発する。
- 不正確なデータが入力された場合、自動的にフェイルセーフモードに切り替わるアルゴリズムを設計する。
4. 開発中のトレーサビリティを確保
ソフトウェア安全要件が開発のすべての段階で適切に追跡可能であることを保証します。
- 手順:
- 要件管理ツール(例:DOORS、Jama)を使用。
- ソフトウェア要件が設計、実装、テストプロセスにどのように反映されるかを文書化。
- 要件が満たされているかを定期的にレビュー。
- 具体例: 歩行者検知システムのソフトウェア要件が、アルゴリズムの設計や検証テストに適切に反映されているかを追跡します。
5. 検証プロセスを実施
設定したソフトウェア安全要件が正確に実装されていることを確認します。
- 手順:
- ユニットテスト、統合テスト、システムテストを実施。
- ソフトウェアが設定された要件を満たしているか確認。
- シミュレーションやハードウェアインザループ(HIL)テストを活用。
- 具体例:
- 車線逸脱防止機能の検証テストで、カメラが車線を正確に認識し、10ms以内に警告を発するか確認。
- カメラが誤動作した際にシステムが正しくフェイルセーフモードに移行するかをテスト。
6. 要件の文書化と見直し
プロジェクトの進行に伴い、安全要件を見直し、適切に文書化します。
- 手順:
- プロジェクト終了時に、すべての要件が満たされていることを最終確認。
- 要件の変更履歴を記録し、将来の参照に備える。
- 外部レビューや監査を実施し、ISO 26262に準拠していることを保証。
- 具体例: カメラの新しいアルゴリズムを導入した際に、関連する安全要件を更新し、その履歴を記録。
ソフトウェア安全要件の設定は、ISO 26262に基づくカメラシステムの設計において非常に重要なプロセスです。適切な要件設定により、カメラシステムの安全性と信頼性を確保し、潜在的なリスクを最小限に抑えることが可能です。
具体的な手順に従って開発を進めることで、高品質で安全な製品を提供できるようになります。
ISO 26262 わかりやすく適用する方法:カメラシステムの開発プロセスとは?
自動車の安全設計においてISO 26262は欠かせない規格であり、カメラシステムの開発でもその重要性が増しています。
この規格は、自動車の電子制御システムやソフトウェアが潜在的なリスクを最小限に抑えながら安全に動作するためのフレームワークを提供します。カメラシステムは、車線維持支援や衝突回避などの運転支援機能の中核を担い、その信頼性と安全性はISO 26262の基準によって保証されます。
本記事では、カメラシステムの開発におけるISO 26262の適用方法や検証・妥当性確認、フォールトトレランス設計、依存故障分析などの具体的なプロセスについて詳しく解説します。
これにより、安全基準を満たしつつ、高品質なシステムを構築するための指針を提供します。
ISO 26262に基づいたカメラシステムの検証と妥当性確認のプロセス

ISO 26262に基づくカメラシステムの検証と妥当性確認は、安全性を保証するための体系的なプロセスです。この手順に従うことで、システムが定義された要件を満たし、実際の運用環境で期待通りに機能することを確認できます。
1. 要件の明確化
検証と妥当性確認プロセスの出発点として、カメラシステムの全体的な要件を明確化します。
- 手順:
- ISO 26262の規定に従い、安全目標(Safety Goals)を特定。
- システム要件を分解し、カメラに関連する詳細な要件(解像度、処理速度、障害物検知性能など)を定義。
- 各要件に対する評価基準を設定。
- ポイント: すべての要件が具体的で測定可能であることを保証します。
2. 検証計画の作成
検証活動を体系的に進めるための計画を立案します。
- 手順:
- ユニットテスト、統合テスト、システムテストのスケジュールを設定。
- 検証に使用するツールや環境(シミュレーション、HIL(Hardware-in-the-Loop)など)を選定。
- 各テストの目的と期待される結果を明確化。
- 具体例: カメラが低照度環境で障害物を検知できるかを確認するため、シミュレーション環境を構築。
3. ユニットレベルの検証
個々のコンポーネント(例:カメラセンサーや画像処理アルゴリズム)が要件を満たしているかを確認します。
- 手順:
- カメラセンサー単体の性能テストを実施(例:解像度やフレームレートの測定)。
- ソフトウェアアルゴリズムが指定された入力条件で正確に動作するかをテスト。
- テスト結果を記録し、要求仕様と比較。
- 具体例: カメラセンサーが1秒間に30フレームを正確に処理し、動く物体を追跡できるかを確認。
4. 統合テスト
システム全体の構成要素が連携して正しく機能するかを確認します。
- 手順:
- カメラセンサー、制御アルゴリズム、通信モジュールなどを統合。
- それぞれのコンポーネント間でデータが正しく伝達されるかをテスト。
- 異常な入力(例:センサーデータの欠損)に対するシステムの反応を確認。
- 具体例: カメラから取得したデータを用いて、衝突回避システムが適切にブレーキ制御を行うかを評価。
5. 妥当性確認
実際の運用環境でシステムが期待通りに機能するかを確認します。
- 手順:
- 実車テストを実施し、カメラシステムがリアルな交通状況で正確に動作するかを評価。
- 異常シナリオ(例:カメラセンサーの一時的な故障)を再現し、リスクが適切に軽減されるかを確認。
- 結果を記録し、トレーサビリティを確保。
- 具体例: カメラが雨天時に道路標識を正確に認識し、ドライバーに通知できるかをテスト。
6. 結果のレビューと文書化
得られた結果をレビューし、適切に文書化します。
- 手順:
- 各テストフェーズの結果を詳細に記録。
- 規定された要件と照らし合わせて評価。
- 検証と妥当性確認の最終レポートを作成。
- ポイント: レポートは監査や認証プロセスに使用されるため、透明性と正確性を確保します。
ISO 26262に基づくカメラシステムの検証と妥当性確認は、システムの安全性と信頼性を保証するための重要なプロセスです。
このプロセスを体系的に実施することで、規格に準拠した安全なカメラシステムを構築し、潜在的なリスクを最小限に抑えることが可能になります。
具体的な手順を踏むことで、設計から実運用まで一貫した安全性を確保することができます。
カメラセンサー故障時の安全メカニズム:フォールトトレランスの実現
フォールトトレランスとは、システムが一部のコンポーネントで障害が発生しても、その機能を維持し続ける設計手法を指します。この手法は、特に安全性が求められる分野で重要視され、自動車の機能安全規格であるISO 26262でも推奨されています。
フォールトトレランスの基本的な原則は以下の通りです。
- 障害の検知
システムがどのような障害に直面しているかを迅速に特定する機能。 - 障害の隔離
問題が発生したコンポーネントをシステム全体から切り離し、影響を最小化する手法。 - 機能の代替
障害が発生した部分を補完する冗長設計やバックアップシステムを活用。
カメラセンサー故障時の安全メカニズムの具体的手順
カメラセンサーにフォールトトレランスを実現するためには、以下の手順を踏むことが効果的です。
1. 冗長性の設計
冗長性は、フォールトトレランスの中心的な要素です。カメラセンサーが故障しても、他のセンサーがその役割を補完できるようにします。
- 手順:
- 複数のカメラセンサーを同一視野に配置。
- 必要に応じて、レーダーやLiDARなどの異なるセンサー技術を追加。
- 冗長センサーのデータをリアルタイムで比較し、異常値を検知。
- 具体例: フロントカメラが故障した場合、サイドミラーに組み込まれたカメラや、レーダーが補完的に機能し、車線維持機能を維持。
2. 異常検知アルゴリズムの構築センサーが正常に動作しているかを監視し、異常を検知するアルゴリズムを実装します。
- 手順:
- カメラセンサーのデータ(画像処理結果、温度、電圧など)を常時モニタリング。
- 設定した閾値を超える異常値を検知。
- 異常発生時には、エラーを通知し、適切な処理を開始。
- 具体例: カメラの視野内に突然ブラックアウト(完全な黒画面)が発生した場合、センサー異常として認識し、冗長センサーに切り替える。
3. フェイルセーフモードの設計
故障が発生した際、システム全体を安全な状態に維持するフェイルセーフモードを設計します。
- 手順:
- 異常検知後、カメラシステムを一時的に停止またはリセット。
- 他のセンサーに制御を移譲。
- 車両運転者に視覚的または聴覚的アラートを表示。
- 具体例: 障害物検知カメラが故障した場合、自動運転システムがその機能を無効化し、ドライバーにマニュアル操作を促す通知を表示。
4. システム全体の統合テスト
フォールトトレランス設計が適切に動作することを確認するため、統合テストを実施します。
- 手順:
- 各センサーの故障シナリオを想定してテストケースを作成。
- シミュレーション環境で異常発生時のシステム挙動を評価。
- 実車テストで最終確認。
- 具体例: 雨天や低照度環境でのテストを実施し、カメラが正常に動作しない場合でもレーダーやLiDARが機能を補完するかを確認。
5. トレーサビリティの確保
ISO 26262に準拠するため、検証結果や設計変更の履歴を文書化します。
- 手順:
- 設計変更やテスト結果をトレーサビリティツールに記録。
- 監査や認証に備えたドキュメントを作成。
- すべての検証データが安全要件を満たしていることを確認。
- 具体例: 障害検知アルゴリズムの変更が他のシステムに影響を与えないことを記録し、報告書にまとめる。
カメラセンサーのフォールトトレランス設計は、自動車の安全性を向上させる鍵です。冗長性、異常検知アルゴリズム、フェイルセーフモードを組み合わせて設計を進めることで、単一障害がシステム全体に影響を与えるリスクを最小化できます。
さらに、ISO 26262に基づく文書化とテストを徹底することで、安全かつ信頼性の高いシステムを構築することが可能です。
カメラ設計における依存故障の分析と回避策
カメラ設計において、依存故障のリスクを管理することは安全性を確保する上で欠かせません。依存故障とは、複数のシステムやコンポーネントが同じ原因で同時に故障するリスクを指します。
このリスクを軽減するためには、まず依存故障分析(DFA)を実施し、潜在的な依存性を特定します。
DFA(依存故障分析)とは?
依存故障分析(Dependent Failure Analysis, DFA)は、複数のシステムやコンポーネントが同時に故障するリスクを評価し、それらの原因を特定する手法です。この手法は、ISO 26262で特に重要視され、自動車の機能安全を保証するために必要不可欠です。
依存故障とは、以下のような状況を指します。
- 共有リソースの故障: 複数のシステムが同じ電源や通信バスを利用している場合、そのリソースが故障すると全てのシステムに影響を及ぼします。
- 環境要因: 高温、振動、電磁波干渉など、共通の環境要因が複数のコンポーネントに同時に影響を与える場合。
- 設計上の依存性: システム間の設計が密接に結びついており、一方が故障すると他方も正常に動作しなくなる場合。
DFAの目的は、このような潜在的な依存故障を洗い出し、リスクを軽減するための設計変更や対策を実施することにあります。
DFAの具体例: カメラ設計での適用
カメラシステムでは、依存故障が特にリスクとなる場面が多く見られます。以下に具体例を挙げ、DFAの手順と回避策を説明します。
例1: 電源共有による依存故障
- シナリオ:
カメラセンサーと画像処理ユニットが同じ電源ユニットを使用している場合、その電源が故障すると両方の機能が停止します。この結果、車線維持や障害物検知といった機能が全て失われる可能性があります。 - DFAの手順:
- 電源回路を詳細に分析し、共有リソースを特定。
- 電源障害がシステム全体に与える影響を評価。
- 冗長化が必要な箇所を洗い出す。
- 回避策:
- カメラセンサーと画像処理ユニットに独立した電源供給回路を設計。
- バッテリーバックアップを導入し、メイン電源の障害時にも動作を継続。
- 電源モニタリング機能を追加し、異常をリアルタイムで検知。
例2: 通信バスの依存性
- シナリオ:
複数のカメラが車両内の通信バスを共有している場合、そのバスが物理的に切断されるか、過負荷状態になると、全てのカメラが機能停止します。 - DFAの手順:
- 通信バスの構成と利用状況を分析。
- バス障害がカメラシステムに与える影響を評価。
- 冗長な通信経路を設計する必要性を検討。
- 回避策:
- 通信バスを複数ルートに冗長化し、一方の経路が故障してもデータ伝送を継続可能にする。
- 各カメラにバス障害時の動作モード(フェイルセーフ)を設定。
- 高い耐障害性を持つプロトコル(例:CAN FD、Ethernet AVB)を採用。
例3: 環境要因の依存性
- シナリオ:
カメラセンサーと周辺電子機器が高温下で動作している場合、全ての機器が同時に熱暴走を起こすリスクがあります。 - DFAの手順:
- 動作温度範囲を分析し、過酷な環境条件での動作をシミュレーション。
- 高温条件がカメラシステムに与える影響を評価。
- 放熱設計や耐熱材料の採用を検討。
- 回避策:
- カメラユニットに専用の放熱機構を追加。
- 動作温度をリアルタイムで監視し、異常時にシステムを安全モードに切り替え。
- 高耐熱性部品を採用し、環境要因による故障リスクを低減。
DFAは、カメラ設計における依存故障を未然に防ぐための重要なプロセスです。電源、通信バス、環境要因といった潜在的な依存性を特定し、適切な対策を講じることで、カメラシステムの安全性と信頼性を大幅に向上させることができます。
ISO 26262に準拠したDFAを実施することで、より堅牢な設計を実現し、車両の機能安全性を高めることが可能です。
ISO 26262のVモデルを活用したカメラ開発プロセスの最適化
ISO 26262のVモデルは、カメラ開発プロセスを効率的かつ体系的に進めるための基本フレームワークです。このモデルでは、開発フェーズと対応するテストフェーズを明確に結びつけることで、要件定義から実装、検証、妥当性確認までを一貫して管理します。
Vモデルの構造とプロセス
Vモデルは、以下の2つの主な要素から構成されています。
- 左側(開発フェーズ)
システムやコンポーネントの要件を詳細化し、設計や実装を進めます。抽象的な要件から具体的な実装へと進む段階です。 - 右側(テストフェーズ)
開発フェーズで定義した要件を基に、テストや妥当性確認を行います。上位要件に対応する検証が可能な形で進められるため、各段階の品質を保証できます。
Vモデルをカメラ開発に適用する具体例
カメラシステム開発におけるVモデルの適用例を、以下のフェーズごとに説明します。
1. システム要件定義
- 目的: 車両の全体システムでのカメラの役割や機能を定義します。
- 具体例:
車線維持支援システムのために、カメラが車線マーカーを検出できるようにする要件を定義します。この際、環境条件(雨天、夜間など)を考慮した性能要件も含めます。
2. 機能安全要件定義
- 目的: ISO 26262の基準に基づき、安全要件を策定します。
- 具体例:
カメラセンサーの故障時、システムが安全モードに移行し、運転者に警告を出す要件を設定します。
3. カメラソフトウェア設計
- 目的: 要件に基づいた画像処理アルゴリズムや異常検知機能を設計します。
- 具体例:
レーンマーカーを正確に認識するアルゴリズムを設計し、異常なデータ入力時にはフェイルセーフメカニズムが作動するようにします。
4. モジュール単位テスト
- 目的: 開発した個別モジュールが期待通り動作するかを確認します。
- 具体例:
画像処理アルゴリズムが、シミュレーション画像を正確に処理し、車線マーカーを認識できるかテストします。
5. システム統合テスト
- 目的: カメラと他のシステム(例: レーダー、LiDAR)の相互作用を確認します。
- 具体例:
カメラデータとレーダーデータを統合し、車両の正確な位置をリアルタイムで特定できるかを検証します。
6. 妥当性確認(最終テスト)
- 目的: 実際の運転環境でシステム全体が期待通りに機能するか評価します。
- 具体例:
実車テストを行い、カメラが昼夜や悪天候下でも車線を確実に検出し、システムが車線維持をサポートできることを確認します。
Vモデルの利点と注意点
- 利点:
- 各フェーズでの明確な要件定義と検証により、開発の効率化を実現。
- トレーサビリティの確保により、規格準拠を容易に証明可能。
- 開発初期段階での問題発見と修正により、後工程でのコスト削減。
- 注意点:
- すべての要件が正確に記述されている必要があり、初期段階での時間とリソースの投資が求められます。
- テスト結果が設計にフィードバックされる仕組みを構築することが重要です。
Vモデルを活用したカメラ開発プロセスでは、システムの安全性を確保しながら、効率的かつ高品質な開発が可能になります。特にISO 26262の基準に準拠することで、製品の信頼性と安全性をさらに向上させることができます。
カメラシステムにおけるランダムハードウェア故障の影響評価
ランダムハードウェア故障は、特定の原因がなく突然発生する故障を指します。カメラシステムにおいては、こうした故障が安全性に与える影響を評価し、適切な対策を講じることが求められます。
例えば、カメラのイメージセンサーが突然故障した場合、その影響が他のシステム全体に波及しないよう、フェイルセーフメカニズムを構築する必要があります。また、故障率を低減するために、部品の品質向上や定期的な診断機能の実装が効果的です。
評価プロセスでは、故障モード影響解析(FMEA)を活用し、故障がもたらす潜在的な影響を特定します。この結果を基に設計を見直し、安全性を確保します。
※FMEAに関しては、こちらの記事を参照してください。
FMEA やり方を徹底解説!初心者にもわかる具体例付き手法
実用化に向けたカメラ設計のISO 26262準拠テストと試験
ISO 26262に準拠したテストと試験は、カメラ設計を実用化するために不可欠なプロセスです。この規格に従うことで、カメラシステムが安全性、信頼性、および性能要件を満たしていることを保証できます。以下では、具体的な試験要件とその実施例を説明します。
ISO 26262準拠の試験要件
ISO 26262では、カメラ設計に適用する試験要件として以下の項目を求めています。
- 環境試験: カメラが過酷な環境条件下で適切に動作するかを確認します。
- 要件: 温度、湿度、振動、衝撃に対する耐性を検証する。
- 具体例: -40℃から85℃の温度範囲での動作確認や、振動テスト(例: 10~2000Hzの振動)を実施。
- 異常動作テスト: センサーやソフトウェアが異常な入力を受けた場合でも安全に動作することを確認します。
- 要件: システムが異常データに対してフェイルセーフモードに移行する。
- 具体例: ノイズを含む画像データを入力し、システムが誤認識を防ぎつつ安全に動作するかを検証。
- 冗長性の検証: 冗長性設計が機能していることを確認します。
- 要件: センサーが故障した場合でもバックアップが作動する。
- 具体例: メインカメラセンサーを無効化し、バックアップカメラで車線認識機能が継続するかをテスト。
- 統合試験: カメラが他のセンサーやシステムと適切に連携することを確認します。
- 要件: データの一貫性とタイミングを保証する。
- 具体例: レーダーとカメラが同時に障害物を検出し、一致するデータを出力できるかを確認。
- ソフトウェア検証: ソフトウェアが要件に従って正確に動作することを確認します。
- 要件: コードの静的解析や、境界値分析を実施。
- 具体例: 昼夜や天候条件の異なるシナリオで、車線検出アルゴリズムが正確に動作するかをシミュレーションテスト。
- 安全ケースの検証: システム全体がISO 26262で定義された安全要件を満たしていることを証明します。
- 要件: 安全ケースを構築し、トレーサビリティを確保する。
- 具体例: 設計要件とテスト結果をリンクさせ、すべてのリスクが適切に対処されていることを文書化。
カメラシステムの具体的な試験例
例: 車線維持支援システム(LKA: Lane Keeping Assist)のカメラ試験
- 環境試験:
車線維持支援システムに使用されるカメラを、以下の条件でテストします。- -40℃の極寒環境下で、車線マーカーが正確に検出できるか確認。
- 湿度90%以上の環境でレンズが曇らない設計をテスト。
- 異常動作テスト:
車線が消えた場合や、カメラが一時的に視界を失うシナリオを再現。- フェイルセーフモードが作動し、運転者に警告を出すまでの反応時間を測定。
- 統合試験:
レーダーと統合した環境で、前方の障害物を認識した場合に車両制御と連携する動作を確認。- レーダーとカメラのデータが一致しない場合の挙動を記録。
ISO 26262準拠テストの重要性
これらの試験は、以下の理由で重要です。
- 安全性の保証: システムが最悪の条件下でも安全に動作することを確認します。
- 規格遵守: ISO 26262に基づく試験により、国際基準を満たす製品を市場に投入できます。
- 信頼性の向上: 厳格な試験により、製品の品質と消費者信頼を向上させます。
ISO 26262準拠のテストを徹底することで、カメラシステムが高い安全性と信頼性を備えたものとなり、実用化に向けた強固な基盤を築くことができます。
ISO26262 わかりやすく解説するカメラシステムの安全設計のまとめ
本記事のまとめを以下に列記します。
- ISO26262は自動車の機能安全を保証するための国際規格である
- カメラシステムの設計はISO26262の基準に従い安全性を確保する必要がある
- 安全設計はリスクの特定と適切な対策を講じることから始まる
- HARAを通じて潜在的な危険を洗い出し、リスクを評価する
- ASIL分類に基づき安全度に応じた設計要件を適用する
- 冗長性設計によりセンサー故障時の機能継続を実現する
- 異常検知アルゴリズムでリアルタイムの障害特定を行う
- フェイルセーフモードで異常時も安全性を確保する
- DFAを用いて依存故障のリスクを軽減する設計を行う
- Vモデルを活用し、設計から検証まで一貫したプロセスを確立する
- 環境試験を通じて過酷条件下での動作を保証する
- 異常動作テストでセンサーの安全性能を確認する
- 統合試験により複数センサーの連携を検証する
- 検証と妥当性確認で設計が要件を満たすことを確認する
- トレーサビリティの確保で安全要件と設計変更を管理する


コメント